סוג המניפולטורים | תיאור המניפולטורים | תיאור המניפולטורים | תמונה | ||
מניפולטור קרטזי (MANIPULATOR CARTESIAN) | קשיחות - (מידת עיוות מכני בעומס) של המפרק הזה הוא גבוה. לכן זרוע קרטזית יכולה לנצל את מלוא כושר הנשיאה שלה כמעט בכל נקודה המתאימה לה.. | למניפולטור הזה יש שלוש דרגות חופש.יתרונות:· קשיחות גבוהה· בקרה פשוטה· רמת דיוק גבוהה· נוח להנעה הידראולית ובעל כושר נשיאה גבוהחסרונות: · מרחב עבודה קטן יחסית: מסגרת המבנה גדולה ומסורבלת. שימוש: רובוט קרטזי מיושם בסוגים שונים של מכונות CNC. |  | ||
מניפולטור כדורי | מניפולטור זה מתאים לשלושה RRP .מרחב עבודה של המניפולטור כדורי היא חלק מ"קליפה" כדורית.מעניין לציין כי הרובוט התעשייתי הראשון שנוצר בתחילת שנות-60 הרובוט UNIMATE של יונימיישן, היה רובוט כדורי. רמת הדיוק של מניפולטור כדורי נמוכה מזו של מניפולטור קרטזי. | למניפולטור זה יש שלוש דרגות חופש.יתרונותמרחב עבודה גדול יחסית. חסרונות· רמת דיוק נמוכה יחסית · בקרה מסובכת · מומנט כוח גבוה ועל הפרק השלישי ועל יחידת הקצה כאשר הזרוע "פשוטה לרווחה". עובדה זו מקטינה את כושר הנשיאה של הזרוע. | 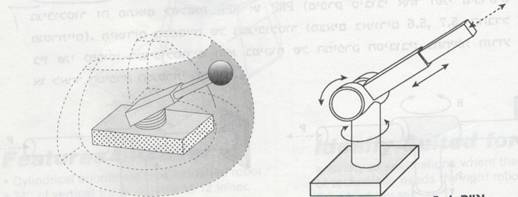 | ||
מניפולטור גלילי |
|
text | 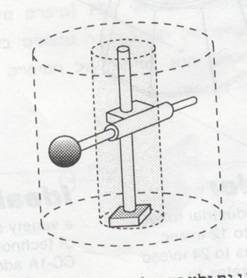 | ||
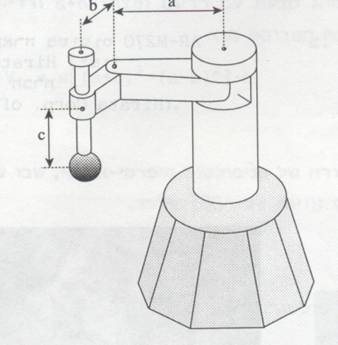
מניפולטור מיפרק-אופקי | מניפולטור זה מתאים לשלשות RRP .כיוון צירי הסיבוב של שני המפרקים הראשונים וציר התנועה של הפרק השלישי מקבילים כולם לציר Z למניפולטור הזה יש ארבע דרגות חופש. | יתרונות:· מרחב עבודה בינוני · מהירות גבוהה של קצה הזרוע. | |||
מניפולטור מיפרקי-אנכי | מניפולטור הזה מתאים ל שלשה RRR (שלושה מפרקים סיבוביים). הזרוע של מניפולטור מפרקי-אנכי דומה במקצת לזרוע אנושית הנמצאת במישור המאונך. למישור הרצפה. זרוע של מניפולטור זה דומה לזרוע אנושית. למניפולטור הזה יש חמשה דרגות חופש. | יתרונות:· מרחב עבודה גדול יחסית. חסרונות: · רמת דיוק נמוכות יחסית . · בקרה מסובכת. · מומנת כוח גבוה על יחידת הקצה | 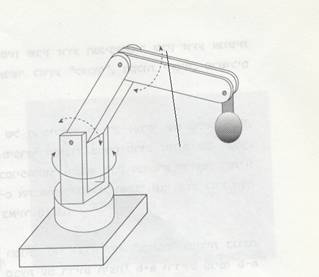 |
יום שני, 18 ביולי 2011
מניפולטורים לרובוטים
הירשם ל-
תגובות לפרסום (Atom)
ניר שלום!
השבמחקהטבלה יפה מאוד.
הציון - 100.
בברכה!
ברוך